Гарвардские инженеры разработали микро-робота, вдохновленного ногохвостками, который способен прыгать на расстояние, в 23 раза превышающее его длину.
Исследователи из Гарвардской школы инженерных и прикладных наук имени Джона А. Полсона (SEAS) представили новый микро-робот, который повторяет удивительные прыжковые способности ногохвосток — крошечных почвенных организмов, обладающих невероятной прыгучестью. Этот микро-робот может как передвигаться, так и преодолевать препятствия, тем самым расширяя возможности маломасштабной робототехники. Разработка, вдохновленная ногохвостками, была описана в недавнем выпуске журнала Science Robotics.
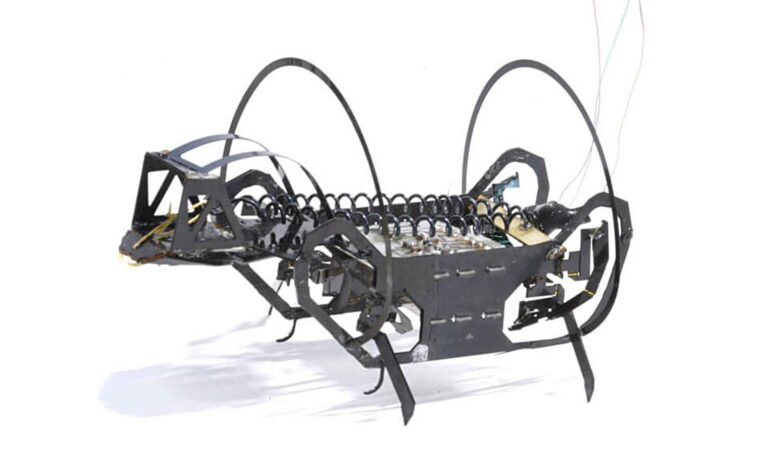
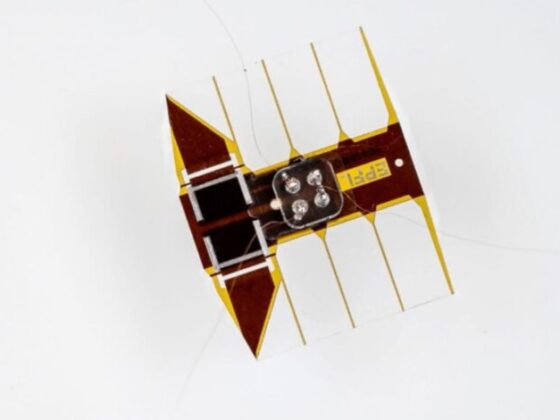
Ногохвостки, часто незаметные обитатели лесной подстилки и садовой почвы, имеют уникальный орган — фуркулу, раздвоенный хвостоподобный придаток, который прячется под их телом. Когда ногохвостке угрожает опасность, она высвобождает фуркулу, чтобы оттолкнуться от поверхности и прыгнуть в воздух, спасаясь от хищников. Вдохновившись этим природным механизмом, команда Гарварда оснастила своего микро-робота HAMR (Harvard Ambulatory Micro-robot) роботизированной версией фуркулы, что позволяет ему совершать впечатляющие прыжки.
«Ногохвостки — интересный источник вдохновения благодаря их распространенности как в пространстве, так и во времени на эволюционной шкале», — отметил соавтор исследования, профессор Гарварда доктор Роберт Дж. Вуд. Он добавил, что у ногохвосток есть уникальный механизм, позволяющий быстро соприкасаться с землей для передачи импульса и начала прыжка.
Робот использует метод, известный как «защелкивающаяся пружинная активация». В этом процессе потенциальная энергия накапливается в упругом элементе — роботизированной фуркуле, которая может высвобождаться за миллисекунды, действуя как катапульта. Этот принцип также наблюдается в природе, например, в быстром выбросе языка хамелеонов или мощных движениях конечностей раков-богомолов.
Команда применила технологии микрофабрикации, разработанные в их лаборатории, чтобы создать робота размером с ладонь и весом, сопоставимым со скрепкой. Этот робот способен ходить, прыгать, карабкаться, ударять предметы и даже поднимать объекты. Его прыжки особенно впечатляют: он может прыгать на расстояние до 1,37 метра, что в 23 раза превышает длину его тела. Для сравнения, аналогичный робот может прыгать вдвое дальше, но при этом он в 20 раз тяжелее.
«Меня поразила простота этого решения, что и побудило меня исследовать этот подход», — поделился первый автор исследования, бывший научный сотрудник SEAS Франсиско Рамирес Серрано. Он отметил, что существующие микро-роботы, которые перемещаются по ровной поверхности и прыгают, не обладают такой ловкостью, как их платформа.
Чтобы обеспечить оптимальное приземление после каждого прыжка, команда использовала детализированные компьютерные симуляции. Это позволило точно контролировать длину связей, количество накопленной энергии и ориентацию робота перед прыжком. Сочетание способности ходить и прыгать в легком роботе открывает новые возможности для навигации в сложных или опасных условиях.
«Ходьба обеспечивает точный и эффективный способ передвижения, но имеет ограничения при преодолении препятствий», — объяснил доктор Вуд. «Прыжки позволяют преодолевать преграды, но менее контролируемы. Комбинация этих двух режимов может быть эффективной для навигации в естественных и неструктурированных средах».
Разработка этого микро-робота, вдохновленного ногохвостками, является очередным примером того, как исследователи обращаются к природе за технологическими инновациями. На этой неделе японские ученые также представили био-гибридный дрон, использующий живые антенны шелкопряда для навигации и обнаружения запахов. Эти инновации открывают путь к будущему, где маневренные роботы смогут самостоятельно перемещаться в узких пространствах, преодолевать сложный рельеф и мониторить окружающую среду
Гарвардские инженеры создали микро-робота, который прыгает в 23 раза дальше своей длины